Warum ein Eigenbau? Wie fast immer im Leben gibt es auch bei dieser Geschichte Vor- und Nachteile. Meiner Meinung nach überwiegen die Vorteile - und das scheinen viele der Trialer auch so zu sehen, denn in meinem Umfeld fahren die Meisten diese Kombination mit fast den gleichen Komponenten. Natürlich kann man auch andere Komponenten als die vorgeschlagene Kombi von Servonaut MFR und RB35 einsetzen - das bleibt jedem selber überlassen. Dieses Team ist auf jeden Fall bewährt!
Vorteile:
- hohe Stellkraft
- kann mit dem Fahrakku betrieben werden - das aufwändige Zusatz-BEC entfällt
- langsame Stellgeschwindigkeit
- individuell anpassbar
Nachteile:
- relativ grosse Baugrösse
- einzelne Komponenten müssen zusammen gebaut werden
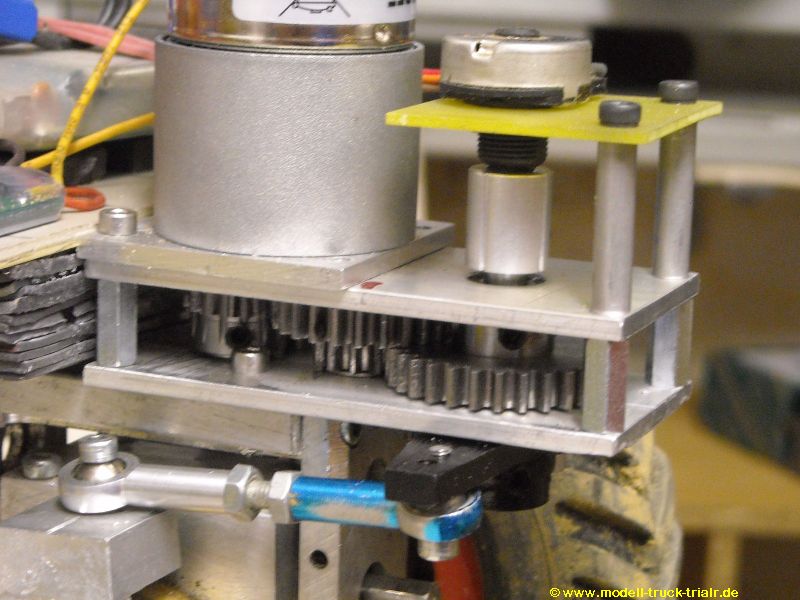
Was passiert denn nun überhaupt bzw. was soll erreicht werden? Wir wollen einen leistungsstarken Servo nachbilden. Dazu benötigt man den RB35 als Stellantrieb. Den RB35 gibt es für wenig Geld z.B. bei Conrad oder mit anderen Motoren bestückt bei Servonaut. Zur Auswahl stehen Varianten mit Getrieben in 1:50, 1:100, 1:200 und 1:600 (bei Conrad). Für diesen Einsatzfall sind Untersetzungen von 1:200 und 1:600 am geeignetsten. Ich persönlich verwende eine Untersetzung von 1:200 mit einem vorgeschalteten Eigenbaugetriebe in 1:4 und Modul 1, um die kleinen Zähnchen des RB35-Getriebes etwas zu schonen. Da hatten wir in der 1:600er Version nämlich schon Karies, was zur Folge hatte, das wir mitten im Wettbewerb den Antrieb um 180 Grad verdrehen mussten, um wenigstens noch fertig fahren zu können. Das 1:4er Untersetzungsgetriebe hat den weiteren Vorteil, das bei einer Drehung des Lenkantriebes, der ja irgendwo zwischen 90 und 180 Grad liegen wird, mehr der kleinen Zähne im RB35-Getriebe genutzt werden als bei einer Direktabnahme von der Motorwelle. Das wird allerdings mit zusätzlichem Platzbedarf und etwas Bastelaufwand erkauft. Aber auch hier: jeder wie er möchte - ist ja individuell anpassbar.
Wer steuert denn nun den Motor an? Dazu braucht es eine sogenannte Servo-Elektronik. Der MFR / MFX von Servonaut kann in einem solchen Modus betrieben werden. Selbstverständlich ginge auch jede andere Servo-Elektronik. Der Einfachheit halber und auch der Qualität wegen setzen die Meisten den MFR / MFX ein: klein in der Baugrösse, alle Anschlüsse steckbar, kurzschlussfest und Überlastgesichert, einfach zu konfigurieren, universell einsetzbar. Ok, hat auch seinen Preis! Den MFR gibt es übrigens nicht mehr - er wurde vom Nachfolge-Modell MFX ersetzt.
Je nach Gusto kann man die Sache in unterschiedlichen Modi ausführen:
- bei Knüppelausschlag links dreht der Motor solange links wie Ausschlag erfolgt. Lässt man den Knüppel los, bleibt die Lenkung in der Stellung stehen
- bei Knüppelausschlag links dreht der Motor solange links, bis er die proportionale Stellung des Knüppel erreicht hat. Lässt man den Knüppel los, dreht die Lenkung wieder in Mittelstellung
In beiden Fällen ist der Knüppel federbelastet und geht selbstständig in Mittelstellung zurück. Für den zweiten Modus wäre noch ein Knüppel denkbar, der nicht selbstständig in Mittelstellung zurück geht, sondern über eine Rasterung in der Stellung verbleibt, in den man ihn bewegt. Das wäre eine Kombi aus Modus 1 und 2
Wie man die Sache betreibt und lieber hat, bleibt - wieder einmal - jedem selber überlassen.
In beiden Fällen muss man jedoch noch etwas tun!
Im Modus 1 - wenn man also den MFR / MFX ohne Poti betreibt, würde er den Motor ansteuern bis man den Knüppel wieder los lässt und auch nicht wieder in Mittelstellung zurücklaufen. Man muss dann nur durch einen Endanschlag dafür sorgen, das der Ausschlag nicht über eine gewisse Grenze erfolgen kann. Üblicherweise macht man das durch kleine Taster, die den Stromfluss zum Motor unterbrechen. Der MFR hat noch den charmanten Vorteil, das er hier die Taster abfragt und die kleinen Taster nicht dem Motorstrom ausgesetzt sind und auch keine Dioden in der richtigen Richtung über den Taster gelötet werden müssen. Natürlich könnte man die Sache auch mechanisch an den Anschlag bringen, aber dann würden jedesmal das Getriebe und der Motor extrem belastet und früher oder später Schaden nehmen. Manchmal ist Endlos-Betrieb sogar gewollt: z.B. bei Seilwinden mit Servoantrieb oder Drehantrieben bei Baggern.
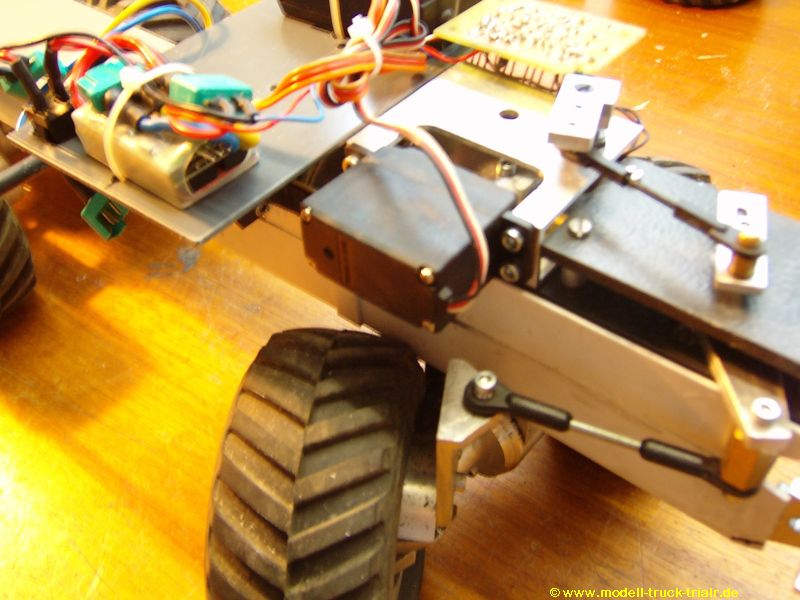
Im Modus 2 wäre noch ein Potentiometer nötig, das über ein mechanisches Feedback die Stellung der Lenkung an die Servoelektronik zurückmeldet. In jedem Servo sitzt dieses ominöse Poti, von dem hier die Rede ist. Es ist dafür verantwortlich zu erkennen, wie die Stellung des Hebels ist und gibt entsprechend Rückmeldung an die Servo-Elektronik. Stimmt Ist- und Soll-Wert nicht überein, regelt die Elektronik entsprechend nach und versucht dem Motor so anzusteuern, das Soll- und Ist-Wert übereinstimmen. Klemmt man jetzt das Poti in einem Servo mechnanisch von der Welle, würde das Servo bei Knüppel-Ausschlag endlos drehen, weil die Rückmeldung fehlt (siehe Modus 1). Du kannst das Poti an beliebige Stelle im Fahrzeug setzen, wo genau ist individuell vom Fahrzeug abhängig! Hauptsache, es ist ein mechanisches Feedback möglich.
Zum Poti: ist egal, Hauptsache zwischen 5 und 10 kOhm. Ich nehme immer welche von Conrad mit Metall-Achse, da ist das Verschrauben haltbarer. Aber auch das ist Geschmacksache.
Beim Bestellen auch an Ersatz denken. Durch die mechanische Belastung auf relativ kleinem Drehwinkel geht schon mal eins kaputt. Wenn mann dann noch Baugleiche liegen hat, ist das einfach nett. Und so die Welt kostet so ein Poti ja nich.
Die zweite Lösung (wie sie wohl die meisten von uns einsetzen) ist die Geschichte mit dem Poti, der die Lage der Lenkung an die Servo-Elektronik zurückmeldet. Die Servo-Elekronik steuert den Motor solange an, bis der Soll-Wert (Ausschlag der Steuerknüppels an der Fernbedienung) mit dem Ist-Wert (Ausschlag der Räder) übereinstimmt. Lässt man den Knüppel los und der Knüppel geht aufgrund der Feder in der FB wieder in Mittelstellung geht auch die Lenung wieder in Mittelstellung. Entfernt man die Feder und ersetzt sie durch eine Raste (üblich z.B. bei Modellfliegern bei der Gasstellung) bleibt die Lenkung entsprechend der Knüppelstellung stehen - also fast so wie Modus 1, nur das man sich hierbei nicht um die Endanschläge kümmern muss bzw. diese über die programmierbare Fernsteuerung einstellen kann.
hier noch mal mögliche Möglichkeiten, das Poti anzulenken: einmal über ein Gestänge und dann noch mal über eine Wellenkopplung.